
სამრეწველო რობოტების ფართო გამოყენებამ ავტომატიზირებულ ქარხნებში მნიშვნელოვნად გააუმჯობესა წარმოების ეფექტურობა.სამრეწველო რობოტის ძირითადი მექანიზმი არის მექანიკური მკლავი.თავისუფლების მრავალხარისხიანი სტრუქტურული დიზაინი საშუალებას აძლევს რობოტულ მკლავს ჰქონდეს უკიდურესად მაღალი მოქნილობა.მას შეუძლია ზუსტად დაადგინოს წერტილები და გადაადგილდეს სივრცეში მოცემული ტრაექტორიის მიხედვით.მექანიკური მკლავის მბრუნავი მექანიზმი ამჟამად იყენებს მბრუნავ ჰიდრავლიკურ ცილინდრს ან სერვოძრავას მბრუნავი მოქმედების შესასრულებლად.მოძრავი რგოლის საკისარი.
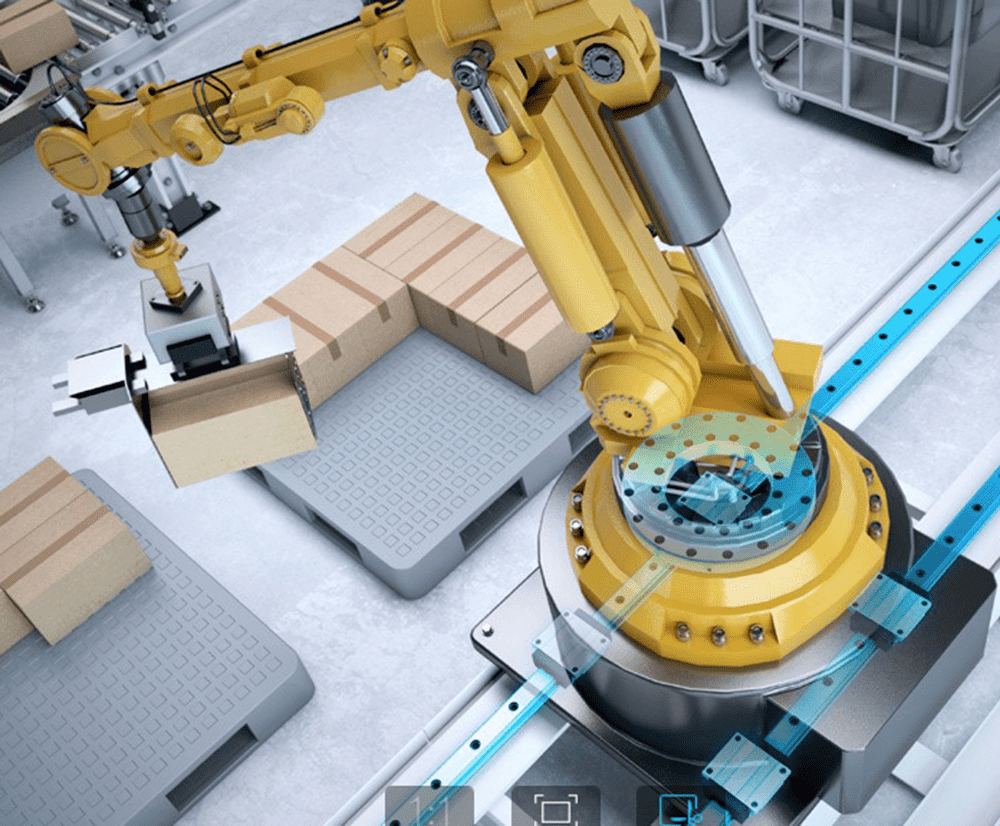
საყრდენი საკისარიაგრეთვე ცნობილი, როგორცმოძრავი რგოლის საკისარი,მბრუნავი საკისარიიგი შეიცავს გარე რგოლს, შიდა რგოლს, მოძრავ სხეულს, ლუქებს. ჩვენი პროდუქციის მასალა არის ზოგადად მაღალი შენადნობის სტრუქტურული ფოლადები, როგორიცაა 42CrMo, 50Mn.რხევაბეჭედიტარებაშეუძლია ნორმალურად იმუშაოს -30℃-დან +70℃-მდე ტემპერატურაზე და ჩვენ შეგვიძლია შევქმნათ სპეციალური ტიპი, როგორც მომხმარებლის საჭიროება.
მოძრავი რგოლის საკისარიმნიშვნელოვან როლს ასრულებს სამრეწველო რობოტების განვითარებაში, ამიტომ იგი ფართოდ არის ცნობილი როგორც "მანქანის სახსარი".სამრეწველო რობოტები ფართოდ გამოიყენება საწარმოო საამქროებში.მათი სიზუსტის მოთხოვნებიდან გამომდინარე, თანამედროვე სამრეწველო რობოტები გავრცელებულია საყრდენი რგოლის საკისრებიჯვარი როლიკერისახვევი რგოლის საკისარი. სუჟოუ ვანდაslewing bearing co.,ltdაქვს მოდელი 11 სერიასახვევი რგოლის საკისარიშეუძლია დააკმაყოფილოს ეს გამოყენება.

გამოქვეყნების დრო: მაისი-11-2020